

If I'm quiet the next few weeks, it's because I'm pressing hard to complete the UM black edition, and I'll be away doing military service in september.
I'll join back in in October, though!

If I'm quiet the next few weeks, it's because I'm pressing hard to complete the UM black edition, and I'll be away doing military service in september.
I'll join back in in October, though!
Just completed the survey, I had some difficulties to decide between some options that where exclusive 
(E.g. I would be happy with a either a micro indoor or a 450 class outdoor, just not interested in flying in bad weather conditions)
Interesting project, I will follow up -- I do have a couple of quads plus some electronics to build more, but I have not much time for flying :(
Hey everyone... with my experience in the industry and working with the Magazine (Multirotor Pilot Magazine - multirotorpilotmag.com), I can define two areas where a cool product would be needed.
1) A waterproof machine that can carry a GOPRO
2) A small 250 size FPV machine that is foldable with arms that are spring-loaded. So you can fit it in a backpack and then press a button and all the arms spring out to the flying position.
What are your thoughts?
Both machines can work with parts from HK
-Erick
Isn't there a military variant of 2), one they launch by throwing it, or wait, that's fixed wing.
Foldable is interesting, springs even more, but that would introduce some more complex dynamic effects I'd say
@ErickRoyer: My preference would be for your option 2). I do travel a lot and it would be great to have a small foldable 250 that I could take with me (as opposed to bulkier quads like DJI Phantoms).
Do you have any thoughts with regard to which flight controller, motors, ESCs, etc. to use?
My vote is for:
1) A waterproof machine that can carry a GOPRO
However I will probably build #2 if that's the way the vote goes.
I like BOTH options - but would prefer option 1 - waterproof and gopro as I want to fly filming over water and in the rain - but would love it to have foldable arms.
IMHO foldable is fine rather than spring operated as I believe in the KISS principle.
Would be good to have two platforms under development - there has to be heaps of crossover ??
James
It is time to set some wheels into motion!
I think option 2 kinda already exists.
What about making it fly + wheels for driving around?
That is still unique.
Not really right Sander?
That thing kinda does that.
Perhaps the second thing, fly and roll is unique?
Hmmm... What about fly & swim??? Something like a hovercarrier?? :-)
haha ok. Maybe not unique.
I meant awesome 
Lets stick with the original idea (I don't want to break the discussion open again).
I will talk with Erick on what the first steps are going to be.
I am guessing like sharing some kind of blueprint of a basic default multirotor, that we can modify and adapt?
Create some basic parameters and guidelines and then perhaps divide it under the participants?
Ok? Alternatives?
Shall we use something like Github to store the files?
Good Morning All!
Just read thru this thread a bit and I love the excitment in here!
I would love to join in and help out! I get my new ultimaker 2 delivered on Monday. This isnt my first printer, I have built and tuned a BFB rapman 3.1 (modded a lot, added alum heated bed with homemade temp controller atmega328 - Sold), owned the Formlabs Form 1 SLS Printer (not so good for strong or big parts - Also Sold).
Anyways, In my Mechanical Engineering undergrad studies, I had designed and 3D printed (on my bfb) a quadcopter just like you all are trying to accomplish in here!  I would post links to it but seeing this is my first post i dont want to get flagged with spamming.
I would post links to it but seeing this is my first post i dont want to get flagged with spamming.
I am very familiar with flying multirotors aswell. I have done many calcualtions for desired flight times, craft weight, motor and esc selection, battery options, flight controller programming, fpv video systems, and antenna selections. I also own a Phantom 2 v+, that i also have modded with long range RX/TX (dragonlink), 2.4ghz video signal boosters, and custom case much more!
Check out my youtube channel for more info on these things! Wong Engineering
p.s. I also used to live in NL back in the day. Leusden and Amersfoort is where i went to school and learned the dutch way! Ik kan nederlands nog een klein beetje spreken maar beter lezen!
Thank you for your great reply!
We have already done some outlining of what we want to do but the entire project yet has to take of.
We are going to work on this with a part of the global community, so the spoken language will be English anyway.
Maar het is goed om te weten dat er iemand ook Nederlands spreekt
Great to have you on the team and if you want to share some links please feel free to do so!
If I understand it correctly you are familiar and willing to help out with designing / cad modeling?
You are correct Sander! I am proficient with Solidworks and Solid Edge ST7 (<-- Use at work) I also have great FEA experience if we need that at all. XD
Here is my youtube channel link.
- VCU quad copter team (design of a single engine variable pitch quadrotor). Here is the 3D printed version in action testing the flight controller and telemetry systems.
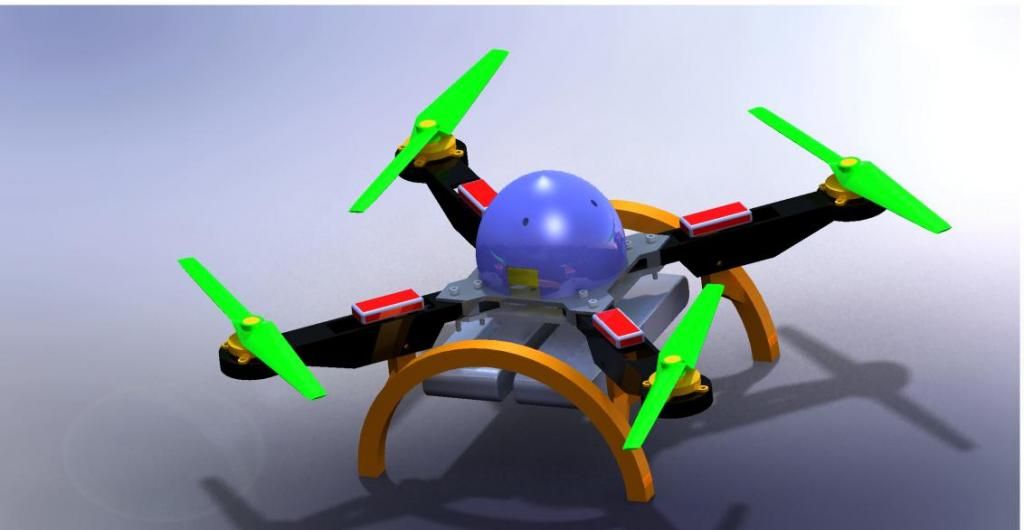
- Quick rendering of the unit

- My modded Phantom v2+
Enjoy!
@MrWong: The unit you've built looks stunning. I was wondering what system components you used and if you have any experience with open source autopilots like Pixhawk and/or APM2.x (good or bad)?
Thank you! It all was a great learning experience.
I do have a good level of understanding how the APM boards work. In that same copter build I had experimented with sonar sensors for programming my own obstacle avoidance algorithms with a standalone atmega328 to handle the override inputs to the Flight Controller. The cheap sonar sensors do not have enough detection range to be installed on the copter, but they were just used to verify my code would work.
I have used the hobby king KK copter board, still own the full APM 2.5 module with the blox GPS system, and of course now experienced the NAZA flight controller with the phantom.
Out of all the Flight controllers that I have used, the NAZA in the phantom is the best plug and play unit, where the APM is more customizable and open source (can be finicky). I like them both, but it would all depend on what you want to use your quad for which controller to go with. If you just want bare bones no extra frills the KK boards are awesome and easy to setup. If you want auto pilot, gps lock, computer control, and pretty much anything else the APM and NAZA are it!
For the components used (off the top of my head)
Both the KK and APM 2.5 were installed on this prototype
Cheap hobbyking motors I think are 2402 1350kv max 18amps
Turnigy plush 30A ESC
4000mah 3s 30-50C Lipo's
Props are 8x4.5 slow fly props
your choice of RX/TX
This unit should yield about 3.2kg of thrust with an all up weight of about 1.2kg and gives about 20 min of hover time.
Before starting on design of the frame and such, I think we need to select components and use of the quad. fpv, long range, stunt? That will give us a good indication of how much power we need and the limitations of weight of the frame.
Something to consider, Clean and dirty mounting plates! Isolation of the flight controller from the prop and motor vibration is a must!
Thanks for all the info. This is really appreciated!
With regard to components, the ultimate decision presumably lies with Sander and the group as a whole, but I must say that I would love to use (and therefore learn about) an APM2.6 or a Pixhawk. These are open source and would allow us to add some really cool features (or not if someone wants to keep cost down).
No problem! Here to help
Also we can create different mounting plates base on which controller one would want to use. The base frame and motor mounting should all be the same and interchangeable between flight controller mounting plates.
That way the design can work with any FC combo.
Just in case we go with a waterproof quad (I'll move it out to another thread if not), I spent some time over the weekend seeing what I could come up with.
Here is my initial layout for a 450 quad (its actually 445) printable in 14 parts and except for the domed top, glued together.


I spent some time over the weekend working on a waterproof quad. Here is my first draft, I'll move it to another thread if we go with a different design. Its a 450 size quad (actually 445) printed in 14 parts. All parts are glued together except the domed top which is screwed on.


Wouldn't it be better to come up with a different type of connection then glue?
When something is glued it is stuck foreverrrr, and maybe you want to replace parts?
Especially if something broke.. you just want to be able to unmount that part.
How about making a screw or click mechanism, and use maybe flexible material as a seal or something?
@Woofy: Do you want to design a quadcopter that can fly in rain, or do you want a real diving/swimming quad?
I love this video:
Waterproof is definately on my agenda.
Woofy - love the design, but echo the assembly comments - looks to me like your central module is great - the waterproof enclosure for the central gear, and a screw down dome, but most quads that i have seen seem to use an open beam design that could connect to the central enclosure and allow mods to the legs and motor mounts.
From what I have read the central electronics needs to be proofed. ESCs need to have a heat sink connection to the outside air, motors can get wet.
No idea what the disadvantages are to having longer cables from ESCs to the motors - is there a loss there? If the escs can be brought into the centre of the bot then can they be mounted on one large heatsink?
i guess we should start to think about a parts list as setting out can then use some standard sizes?
James

ArunC posted a topic in UltiMaker Cura,

.thumb.jpeg.0b7a05eafc09add17b8338efde5852e9.jpeg)
Dustin posted a topic in Firmware,









Recommended Posts
Top Posters In This Topic
22
21
20
17
Popular Days
Aug 12
18
Aug 13
17
Jul 30
16
Jul 31
11
Top Posters In This Topic
SandervG 22 posts
woofy 21 posts
gr5 20 posts
closedcircuit 17 posts
Popular Days
Aug 12 2014
18 posts
Aug 13 2014
17 posts
Jul 30 2014
16 posts
Jul 31 2014
11 posts
Posted Images
SandervG 1,521
I think it is time we made some decisions and chose a direction!
I will take the input at heart from the survey and chose a direction with Rick which he also believes is doable.
Will report back in a short while
Link to post
Share on other sites