


Wow, lucky you. I don't think there are any multirotor meets near where I live (Norfolk/Suffolk border - uk).
My 2nd generation quad (posts #164, #173 above) decided to pick a fight with an innocent unarmed tree the other day.
Tree 1 - Quad 0
Now retired with a broken arm.
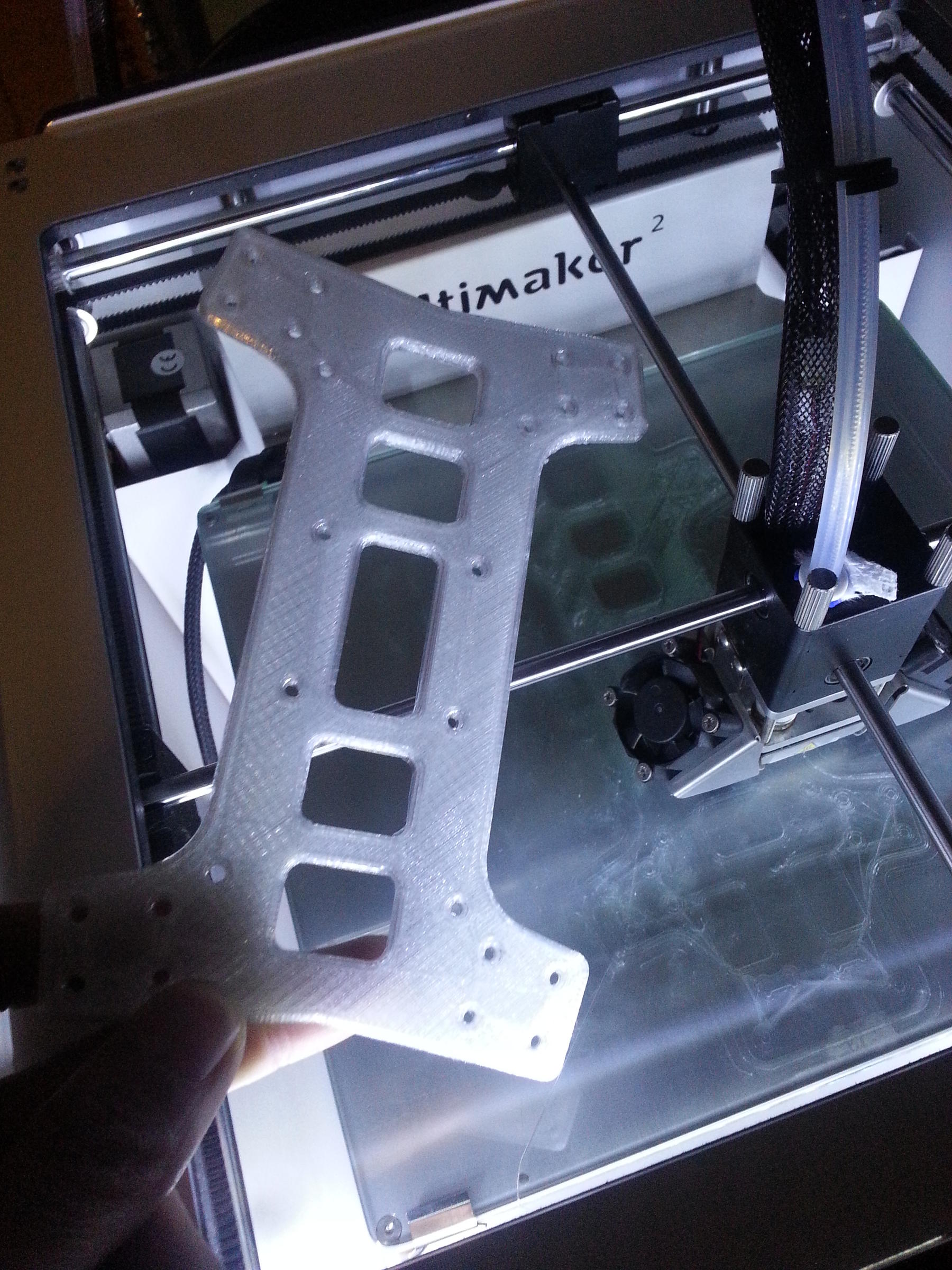
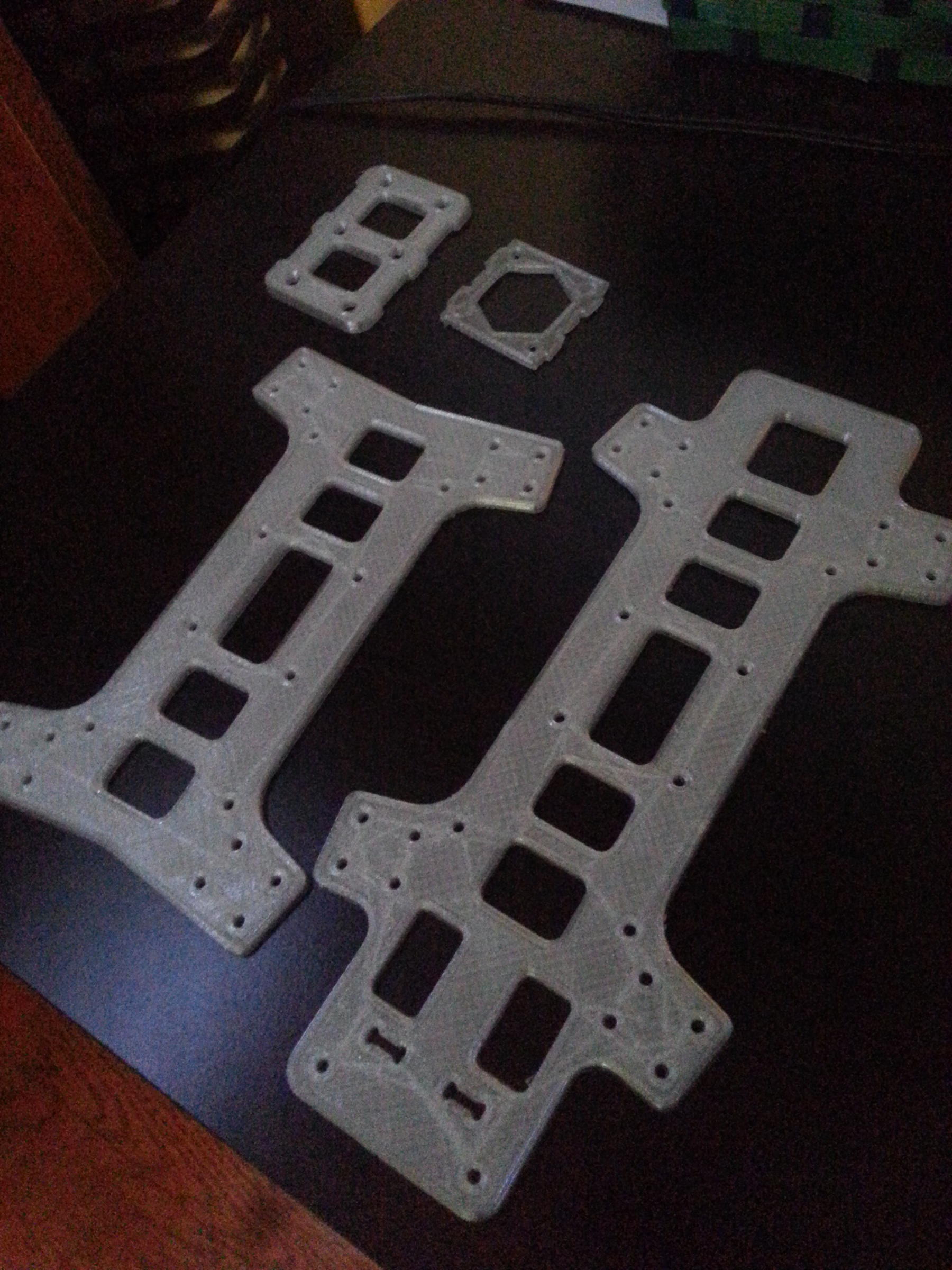
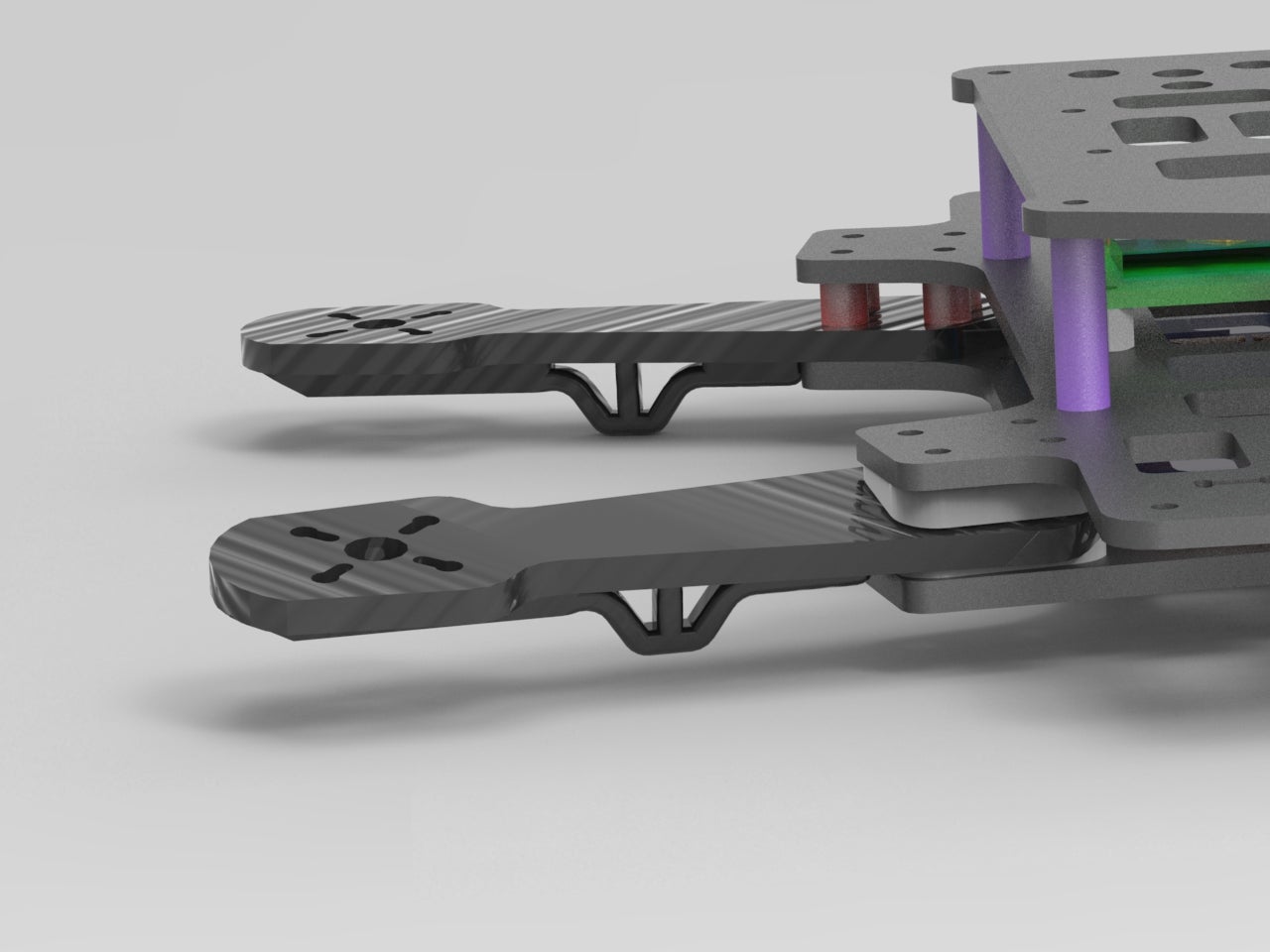
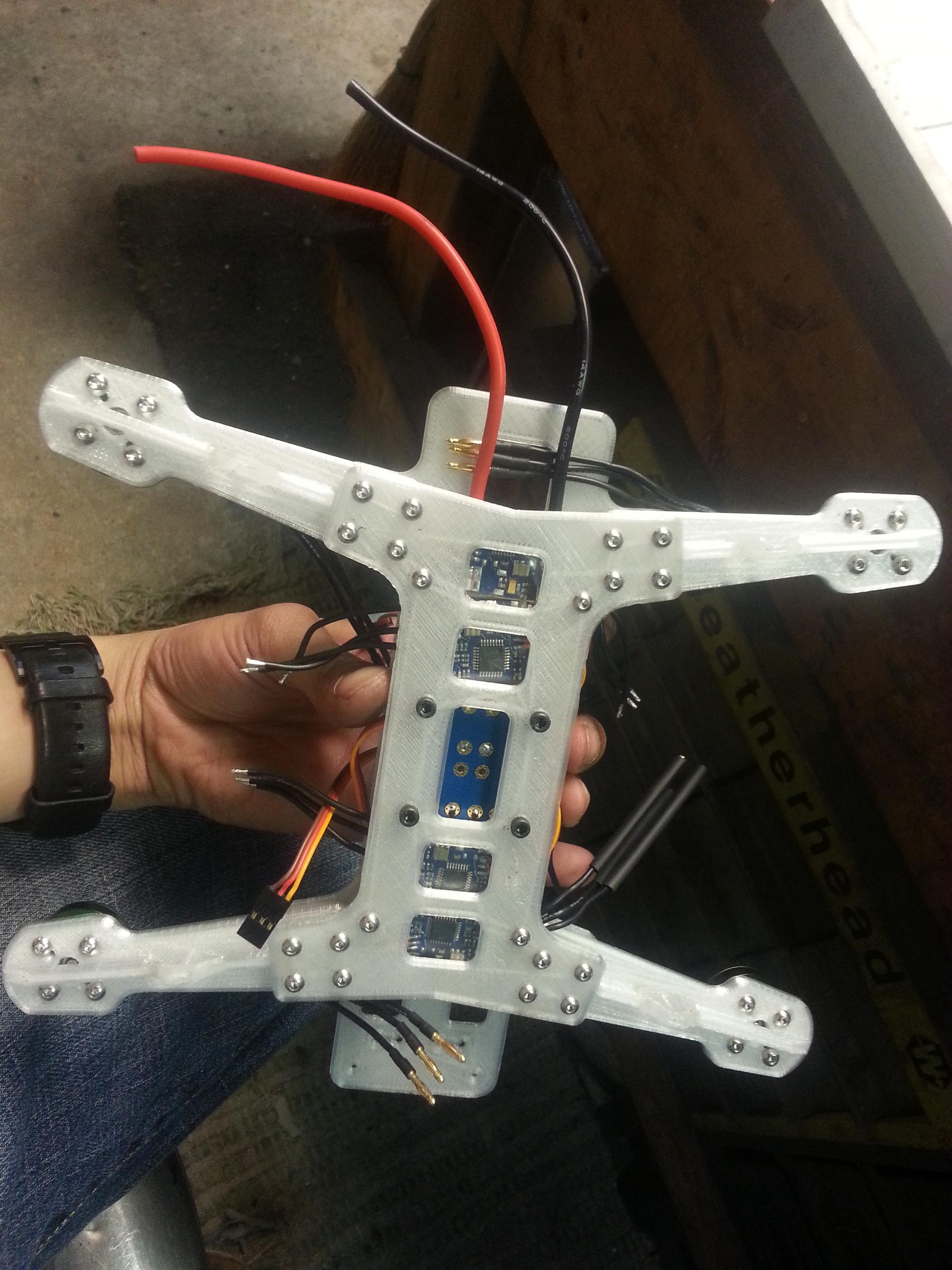
Design of generation 3 is well under way though, and will also include FPV this time.

















.thumb.jpeg.0b7a05eafc09add17b8338efde5852e9.jpeg)
Recommended Posts
Top Posters In This Topic
22
21
20
17
Popular Days
Aug 12
18
Aug 13
17
Jul 30
16
Jul 31
11
Top Posters In This Topic
SandervG 22 posts
woofy 21 posts
gr5 20 posts
closedcircuit 17 posts
Popular Days
Aug 12 2014
18 posts
Aug 13 2014
17 posts
Jul 30 2014
16 posts
Jul 31 2014
11 posts
Posted Images
jonnybischof 60
I know someone who has an amazing rig, too! (What's wrong with me today?? o.O)
Link to post
Share on other sites